37687010
Description
Mind Map by JHON ANDERSON RIVERA CASTRILLON, updated more than 1 year ago
|
|
Created by JHON ANDERSON RIVERA CASTRILLON
almost 2 years ago
|
|
SISTEMAS
- SISTEMAS MECANICOS TRASLACIONALES
- Las variables más comunes
utilizadas para describir los
movimientos de traslación
en sistemas mecánicos son:
x desplazamiento (m),// v
velocidad (m/s),// a
aceleración (m/s2),// f fuerza
(N),// w energía (J),// p potencia
(w)
- MASA
- La segunda ley de Newton
establece que la resultante de las
fuerzas que actúan sobre un
cuerpo es igual a la velocidad de
cambio de la cantidad de
movimiento, que en el caso más
común de masa M constante da
lugar a la siguiente ecuación:
- M*(dv/dt)=f
- M*(dv/dt)=f
- La segunda ley de Newton
establece que la resultante de las
fuerzas que actúan sobre un
cuerpo es igual a la velocidad de
cambio de la cantidad de
movimiento, que en el caso más
común de masa M constante da
lugar a la siguiente ecuación:
- ENERGIA CINETICA
- La energía puede ser almacenada
en forma de energía cinética si la
masa se encuentra en movimiento
y en forma de energía potencial si
presenta un desplazamiento
vertical relativo respecto a su
posición de referencia. La energía
cinética vale Wc = (1/2)*M*V^2
- La energía puede ser almacenada
en forma de energía cinética si la
masa se encuentra en movimiento
y en forma de energía potencial si
presenta un desplazamiento
vertical relativo respecto a su
posición de referencia. La energía
cinética vale Wc = (1/2)*M*V^2
- ELASTICIDAD
- Un elemento mecánico que sufre
un cambio de forma cuando se le
aplica una fuerza, puede ser
caracterizado por un elemento
elástico si existe una relación
algebraica entre la fuerza aplicada
y la elongación producida. El
elemento elástico más común es el
resorte.
- La relación entre la fuerza y la elongación es la
curva característica del resorte. Para un resorte
lineal la curva es una línea recta y por tanto f=K*x
donde K es la constante del resorte (N/m). La
energía potencial almacenada en un resorte lineal
es Wp=(1/2) K * x^2
- La relación entre la fuerza y la elongación es la
curva característica del resorte. Para un resorte
lineal la curva es una línea recta y por tanto f=K*x
donde K es la constante del resorte (N/m). La
energía potencial almacenada en un resorte lineal
es Wp=(1/2) K * x^2
- Un elemento mecánico que sufre
un cambio de forma cuando se le
aplica una fuerza, puede ser
caracterizado por un elemento
elástico si existe una relación
algebraica entre la fuerza aplicada
y la elongación producida. El
elemento elástico más común es el
resorte.
- EJEMPLO
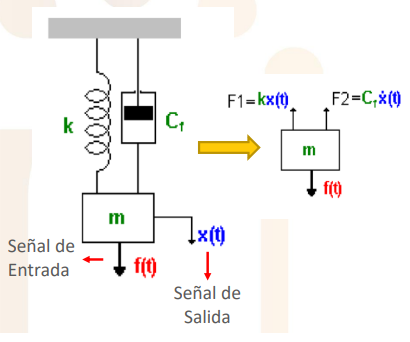
- SISTEMA MASA RESORTE AMORTIGUADOR
- El análisis se realiza con respecto a
las fuerzas que actúan sobre la
masa ‘ se tienen tres fuerzas el
estímulo f(t) y las fuerzas que
ejercen el resorte y el
amortiguador, por tanto
- SE ENCUENTRA LA ECUACION
DEL SISTEMA
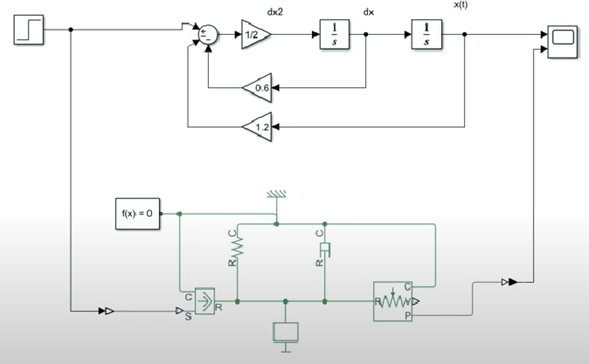
- LA ECUACION SE PUEDE REPRESENTAR DE LA
SIGUIENTE MANERA DONDE SE COMPRUEBA SU
FUNCIONAMIENTO (PARA EL EJEMPLO SE
ASIGNARON UNOS VALORES A LAS VARIABLES)
- LA ECUACION SE PUEDE REPRESENTAR DE LA
SIGUIENTE MANERA DONDE SE COMPRUEBA SU
FUNCIONAMIENTO (PARA EL EJEMPLO SE
ASIGNARON UNOS VALORES A LAS VARIABLES)
- SE ENCUENTRA LA ECUACION
DEL SISTEMA
- El análisis se realiza con respecto a
las fuerzas que actúan sobre la
masa ‘ se tienen tres fuerzas el
estímulo f(t) y las fuerzas que
ejercen el resorte y el
amortiguador, por tanto
- SISTEMA MASA RESORTE AMORTIGUADOR
- Las variables más comunes
utilizadas para describir los
movimientos de traslación
en sistemas mecánicos son:
x desplazamiento (m),// v
velocidad (m/s),// a
aceleración (m/s2),// f fuerza
(N),// w energía (J),// p potencia
(w)
Media attachments
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.