6474159
Description
Mind Map by CESAR GOMEZ QUINTERO, updated more than 1 year ago
|
|
Created by CESAR GOMEZ QUINTERO
over 8 years ago
|
|
Microcontroladores PIC
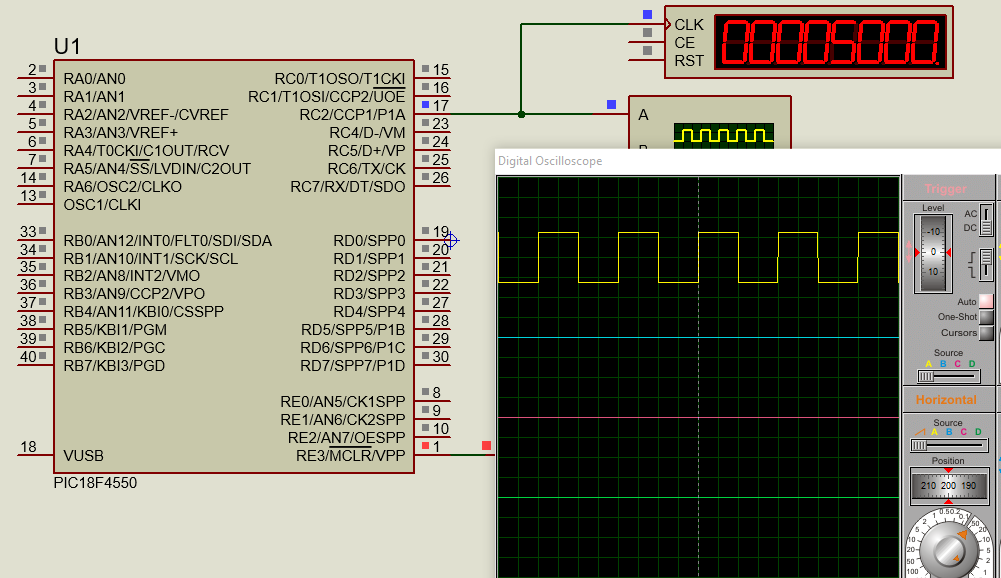
- PIC18F4550
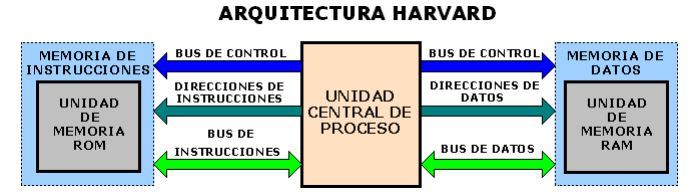
- Arquitectura
- HARVARD
- BUS DE INSTRUCCIONES
- 21 LINEAS DE DIRECCION
- 16/8 LINEAS DE DATOS
- 16 LINEAS INSTRUCCIONES
- 8 LINEAS DATOS
- 16 LINEAS INSTRUCCIONES
- 21 LINEAS DE DIRECCION
- BUS DE DATOS
- 12 LÍNEAS DIRECCION
- 8 LÍNEAS DE DATOS
- 12 LÍNEAS DIRECCION
- MAYOR VELOCIDAD
- MAYOR CAPACIDAD DE PROCESAMIENTO
- MAYOR CAPACIDAD DE PROCESAMIENTO
- MAYOR CANTIDAD DE HARDWARE
- ACCESO SIMULTÁNEO A LA MEMORIA DE
PROGRAMA Y A LA MEMORIA DE DATOS
- EJECUTA INSTRUCCIÓN
MIENTRAS LEE MEMORIA
DEL PROGRAMA
- EJECUTA INSTRUCCIÓN
MIENTRAS LEE MEMORIA
DEL PROGRAMA
- BUS DE INSTRUCCIONES
- HARVARD
- RELOJ
- MODOS
- OSCILADOR INTERNO
- Preescalador para dividir entre 1 ... 12
- multiplexor
- PLL 96 MHz
- Posescalador
- oscilador primario
- FRECUENCIA OPERACIÓN
- 48 Mhz
- 48 Mhz
- FRECUENCIA OPERACIÓN
- oscilador primario
- Posescalador
- PLL 96 MHz
- multiplexor
- Preescalador para dividir entre 1 ... 12
- OSCILADOR EXTERNO
- 4 MHz
- Cristal de cuarzo
- CONDENSADORES
- CONDENSADORES
- Cristal de cuarzo
- Fuente externa
- 4 MHz
- OSCILADOR INTERNO
- MODOS
- ALU
- EJECUTA OPERACIONES
- EJECUTA OPERACIONES
- ORGANIZACIÓN MEMORIAS
- MEMORIA PROGRAMA
Annotations:
- Memoria Flash interna de 32.768 bytes, almacena instrucciones y constantes / datos, puede ser escrita/leída mediante un programador externo o durante la ejecución de un programa mediante punteros
- MEMORIA RAM DATOS
Annotations:
- Memoria SRAM interna de 2048 bytes en la que están incluidos los registros de función especial, almacena datos de forma temporal durante la ejecución del programa, puede ser escrita / leída en tiempo de ejecución mediante diversas instrucciones
- MEMORIA EEPROM
Annotations:
- Memoria no volátil de 256 bytes, almacena datos que deben conservar aun en ausencia de tensión de alimentación, puede ser escrita/leída en tiempo de ejecución a través de registros
- PILA
Annotations:
- Almacena la dirección de la instrucción después de una interrupción
- 31 PALABRAS 21 BITS
- Memoria de configuración
Annotations:
- Memoria en la que se incluyen los bits de configuración (12 bytes de memoria Flash) y los registros de identificación (2 bytes de memoria de solo lectura).
- Oscilador
- Reset
- Watchdog
- Escritura
- MEMORIA PROGRAMA
- UNIDADES FUNCIONALES
- PUERTOS
Annotations:
- Registros de los puertos para su configuración Registro TRIS: mediante este registro se configura cada una de las líneas de E/S del puerto como Entrada (bit correspondiente a “1”) o como Salida (bit correspondiente a “0”); • Registro PORT: mediante este registro se puede leer el nivel de pin de E/S y se puede establecer el valor del Latch de salida; • Registro LAT: mediante este registro se puede leer o establecer el valor del Latch de salida
- ENTRADAS
- SALIDAS
- DIGITALES
- ANALÓGICAS
- DIGITALES
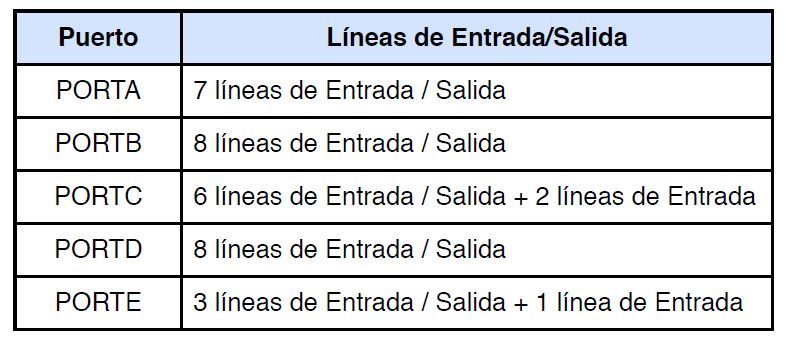
- PUERTO A
Annotations:
- El Puerto A, dispone de siete líneas de Entrada y Salida. Las funciones alternativas son: • RA0: Entrada análoga (AN0) / Entrada de comparación (C1IN-); • RA1: Entrada análoga (AN1) / Entrada de comparación (C2IN-); • RA2: Entrada análoga (AN2) / Entrada de comparación (C2IN+); • RA3: Entrada análoga (AN3) / Entrada de comparación (C2IN+); • RA4:Entrada de reloj del temporizador 0 (TOCKI) / Salida de comparación (C1OUT); • RA5: Entrada análoga (AN4) / Salida de comparación (C2OUT) / HLVDIN entrada de detección de tensión alta/baja; • RA6: Entrada del oscilador principal (OSC2) / Salida de señal de reloj (CLK0).
- PUERTO B
Annotations:
- • RB0: Entrada análoga (AN12) / Interrupción externa 0 (INT0) / Entrada de fallo del ECCP (FLT0) / Entrada de datos del SPI (SDI) / Línea de datos del I2C (SDA); • RB1: Entrada análoga (AN10) / Interrupción externa 1 (INT1) / Línea de reloj del SPI (SDI) / Línea de reloj del I2C (SDA); • RB2: Entrada análoga (AN8) / Interrupción externa 2 (INT2) / Salida de datos del USB (VCMO); • RB3: Entrada análoga (AN9) / Línea de E/S del CCP2 / Salida de datos USB (VPO); • RB4: Entrada análoga (AN11) / Interrupción por cambio en pin (KBI0) / Salida de CS del SSP (VPO); • RB5: Interrupción por cambio en pin (KBI1) / Línea de programación (PGM); • RB6: Interrupción por cambio en pin (KBI2) / Línea de programación (PGC); • RB7: Interrupción por cambio de pin (KBI3) / Línea de programación (PGD).
- PUERTO C
Annotations:
- El Puerto C dispones de cinco líneas de Entrada y Salida (RC0, RC1, RC2, RC6 Y RC7) y dos líneas de solo entrada (RC4 y RC5). Las funciones alternativas son: • RC0: Salida del oscilador del temporizador 1 (T1OS0) / Entrada de controlador de los temporizadores 1 y 3 (T13CK1); • RC1: Entrada del oscilador del temporizador 1 (T1OS1) / Línea de E/S del CCP2 / Salida OE del transciever del USB (UOE); • RC2: Línea de E/S del CCP1 / Salida PWM del ECCP1 (P1A); • RC4: Línea menos del bus USB (D-) / Línea de entrada del USB (VM); • RC5: Línea más del bus USB (D+) / Línea de entrada del USB (VP); • RC6: Salida de transmisión del EUSART (TX) / Línea de reloj del EUSART (CK); • RC7: Entrada de recepción del EUSART (RX) / Línea de datos síncrona del EUSART (DT) / Salida de datos del SPI (SDO).
- PUERTO D
Annotations:
- El Puerto D dispone de ocho líneas de Entrada y Salida. Las funciones alternativas son: • RD0: Línea de datos del SPP (SPP0); • RD1: Línea de datos del SPP (SPP1); • RD2: Línea de datos del SPP (SPP2); • RD3: Línea de datos del SPP (SPP3); • RD4: Línea de datos del SPP (SPP4); • RD5: Línea de datos del SPP (SPP5) / Salida PWM del ECCP1 (P1B); • RD6: Línea de datos del SPP (SPP6) / Salida PWM del ECCP1 (P1C); • RD7: Línea de datos del SPP (SPP7) / Salida PWM del ECCP1 (P1D).
- PUERTO E
Annotations:
- El Puerto E dispone de tres líneas de Entrada y Salida (RE0, RE1, RE2) y una línea de sólo entrada (RE3). Las funciones alternativas son: • RE0: Entrada análoga (AN5) / Salida de reloj 1 del SPP (CK1SPP); • RE1: Entrada análoga (AN6) / Salida de reloj 2 del SPP (CK2SPP); • RE2: Entrada análoga (AN7) / Salida habilitación del SPP (OESPP); • RE3: Línea de Reset externo (MCLR) / Línea de programación (VPP).
- PERIFERICOS (aplicación)
- CONTADORES
- TEMPORIZADORES
Annotations:
- 0 A 3
- 1
- 2
Annotations:
- • Temporizador de 8 bits (registro TMR2); • Registro de periodo PR2; • Pre-escalar de 2 bits programable (1:1, 1:4, 1:16); • Post-escalar de 4 bits (1:1, ... 1:16); • Interrupción por igualdad entre TMR2 y PR2; • Se pude utilizar con los módulos CCP y ECCP; • Se puede utilizar como señal de reloj para MSSP en modo PSI; • Los registros TMR2 y PR2 son de lectura y escritura, además los contadores del pre-escalar y del post-escalar no son accesible por el usuario; • La señal de salida del Temporizador 2 puede ser utilizada en el modulo CCP para generar señales PWM o en el módulo MSSP como señal de reloj del modulo SPI; • La señal de salida del Temporizador está conectada a un contador postescalar que se incrementa cada vez que se produce la igualdad entre TMR2 y PR2. 15
- 3
Annotations:
- • Configurable como temporizador/contador de 16 bits; • Dispones de varias opciones de señal de reloj en el modo temporizador; • Pre-escalar de 3 bits programable; • Interrupción por desbordamiento.
- CONVERTIDORES ADC
Annotations:
- Las características fundamentales son: • 10 bits de resolución; • 13 canales multeplexados; • Señal de reloj de conversión configurable; • Tiempo de adquisición programable (0 a 20TAD); • Posibilidad de establecer el rango de tensión de conversión mediante tensiones de referencias externas.
- Método de captura de señales analógicas
- COMUNICACIÓN SERIAL EUSART
Annotations:
- Las características fundamentales de este sistema de comunicación son: • Modo de trabajo; • Modo asíncrono de 8 bits; • Modo asíncrono de 9 bits; • Modo síncrono Maestro; • Modo síncrono Esclavo; • Auto activación por detección de datos recibidos; • Detección automática de velocidad de comunicación (Baud Rate); • Transmisión y detección de carácter de Break (bus LIN).
- USB
- Unidades de
comparación,
captura, PWM
Annotations:
- Dispone de tres modos de funcionamiento: • Modo de Captura: se utiliza para medir eventos externos como la duración de pulsos digitales; • Modo de Comparación: se utiliza para generar señales digitales com temporizaciones programables. Este tipo de señales son muy útiles para el control de etapas de potencia (convertidores DC/DC, DC/AC, AC/DC, AC/AC); • Modo PWM: se utiliza para generar señales de modulación por ancho de pulso.
- COMPARADAORES
- CCP
- CCP
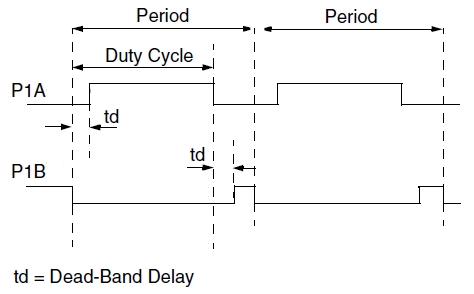
- PWM
Annotations:
- El Modo PWM permite generar una señal PWM de ciclo de trabajo y frecuencia programable. El funcionamiento de este modo es el siguiente: • Un registro de 10 bits, compuesto por CCPR2H y por un registro interno de 2 bits, se comprara constantemente con un contador de 10 bits, compuesto por el registro TMR2 del Temporizador 2 y un pre-escalar de 2 bits; • Cuando el valor del contenedor se hace igual al del registro se pone a “0” el pin de salida del CCP; • En paralelo el registro PR2 se compara constantemente con el registro TMR2 del Temporizador 2. Cuando el valor de TMR2 alcanza PR2, se pone a “1” el pin de salida del CCP, se inicializa a “0” el valor del contador de 10 bits y el valor del registro de 10 bits se recargan con el valor del registro CPPR2L y los bits CCP2CON.
- mODULACIÓN POR ANCHO DE PULSO
Annotations:
- Para generar la señal PWM s deben seguir los siguientes pasos: • Configurar el pin CCP (RC1 o RB3) como salida; • Configurar el Temporizador 2 para que trabaje como temporizador. Puede utilizarse el pre-escalar del Temporizador 2, pero no puede utilizarse el post-escalar; • Configurar el modulo CCP en modo PWM; • Establecer el periodo de la señal PWM mediante el valor del registro PR2.
- MODO CAPTURA
- Comunicación serial MSSP
Annotations:
- El modulo MSSP puede operar en uno de estos dos modos: • Serial Peripheral Interface (SPI) o interface serial para periféricos; • Inter-Integrated Circuit (I2C): • Modo maestro o Master; • Modo esclavo o Slave con direcciones generales.
- SPI
Annotations:
- En el modo SPI los 8 bits de datos son sincronizados para transmitir o recibir simultáneamente. Los cuatro modos del SPI son: • Salida dato serial (SDO): RC7/RX/DT/SDO; • Entrada de dato serial (SDI): RB0/AN12/INT0/FLT0/SDI/SDA; • Reloj serial (SCK): RB1/AN10/INT1/SCK/SCL.
- I2C
Annotations:
- El bus I2C, es un estándar que facilita la comunicación entre microcontroladores, memorias y otros dispositivos con cierto nivel de inteligencia. Su principal característica es que utiliza dos líneas para transmitir la información, una para los datos y otra para la señal de reloj. Los dispositivos conectados al bus I2C tienen una dirección única para cada uno. También pueden ser maestro o esclavo. El dispositivo maestro inicia la transferencia de datos y además genera la señal de reloj, pero no es necesario que el maestro sea siempre el mismo dispositivo, esta característica se la pueden ir pasando los dispositivos que tengan esa capacidad. Esta característica hace que la bus I2C se le denomine bus multimaestro. SCL (System Clock): es la línea de los pulsos de reloj que sincronizan el sistema; • SDA (System Data): es la línea por la que se mueven los datos entre los dispositivos; • GND (masa): común de la interconexión entre todos los dispositivos conectados al bus.
- Transmisión de datos en paralelo ssp
- CONTADORES
- RESET
Annotations:
- El microcontrolador PIC 18F4550 posee las siguientes clases de Reset: • Reset por fallo de energía (POR); • Reset por MCLR durante la operación normal; • Reset de MCLR durante modos de ahorro de energía; • Reset por el perro guardián (WDT) durante ejecución; • Reset por cese de energía (BOR); • Instrucción RESET; • Reset por desbordamiento de la Pila; • Reset por vaciado de la Pila. 43
- PUERTOS
- Arquitectura
- VS
- MICROPROCESADOR
- No tiene periféricos embebidos
- No tiene memoria para guardar su programa
- No tiene periféricos embebidos
- MICROPROCESADOR
- FAMILIAS
Media attachments
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Want to create your own Mind Maps for free with GoConqr? Learn more.