37708999
Description
Quiz by Alfonso Vela, updated more than 1 year ago
|
|
Created by Alfonso Vela
over 2 years ago
|
|
Question 1
Question
El modelo cinemático de un robot móvil con orugas es prácticamente igual al modelo de un robot móvil con llantas y tracción diferencial
Image:
Rob1 (binary/octet-stream)
{kind=link}
Answer
- True
- False
Question 2
Question
El diseño de un robot caminador con tres patas es factible, tomando en consideración la estabilidad de la estructura.
Image:
Rob2 (binary/octet-stream)
{kind=link}
Answer
- True
- False
Question 3
Question
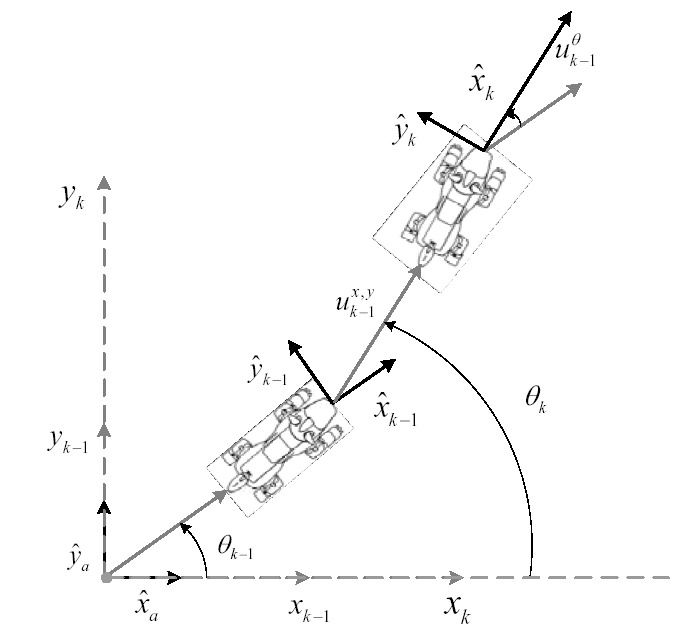
Es un procedimiento matemático simple para determinar la ubicación actual de una embarcación / robot.
Image:
Rob3 (binary/octet-stream)
{kind=link}
Answer
-
Odometría
-
Variables de estado
-
Cinemática
Question 4
Question
Los robots con [blank_start]ruedas[blank_end] son el tipo de robot móvil más común. Se pueden usar para navegar en ambientes interiores y [blank_start]exteriores[blank_end], son fáciles de controlar, y tienen menos problemas de [blank_start]estabilidad[blank_end].
Answer
-
ruedas
-
exteriores
-
estabilidad
Question 5
Question
En un robot con patas, las fases que conforman el caminar- andar del robots son el [blank_start]stance[blank_end] (apoyo) y el [blank_start]swing[blank_end] (balanceo).
Answer
-
stance
-
step
-
swing
-
sting
-
sweep
Want to create your own Quizzes for free with GoConqr? Learn more.