38461426
Description
Quiz by Lucas Serrano, updated more than 1 year ago
|
|
Created by Lucas Serrano
over 1 year ago
|
|
Question 1
Question
[Enero 2018] Según el formato de dirección IEC 61131.3 en un PLC de Schneider, ¿Qué dirección de las siguientes se corresponde con el valor proporcionado por el ADC de la entrada 3 del módulo analógico que está montado en la posición 2 del bastidor 1?
Answer
-
%IW1.2.3.
-
%CH1.2.3
-
%IX3.2.1
-
%CH.3.2.1.VALUE
Question 2
Question
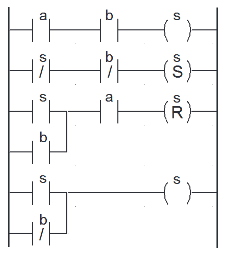
[Enero 2018] El programa en lenguaje de contactos o LD representado a la derecha no es recomendable porque actúa sobre la misma variable de salida “s” en varias redes. Pero, si se implementara este programa, ¿qué valor tendría la salida física del PLC asociada a “s”
cuando “a=1” y “b=0”?
Image:
2e2018 (binary/octet-stream)
{kind=link}
Answer
-
La salida física siempre será 0.
-
La salida física siempre será 1
-
La salida física cambia entre 0 y 1 en cada ciclo.
-
Indefinido: no se puede asegurar que valor tendrá la salida física
Question 3
Question
[Enero 2018] Cada etapa de un programa SFC tiene asociada una variable con un nombre como “etapa.x”. ¿Qué significado tiene esta variable?
Answer
-
Es el tiempo que ha estado ejecutándose la etapa desde su activación.
-
Es un indicador booleano que es cierto si la etapa está activa
-
En un indicador booleano de error que se pone a cierto si la duración de la etapa dura más de lo establecido en sus propiedades
-
Es una variable booleana que permite activar o desactivar la etapa según se escriba en ella un valor de cierto o false respectivamente
Question 4
Question
[Enero 2018] ¿Cuál de estas afirmaciones sobre los servo-drive es FALSA?
Answer
-
Es imprescindible que el motor que controlan tenga un encoder o un resolver
-
Utilizan un circuito inversor para generan ondas sinusoidales que aplican a un motor de corriente alterna trifásico.
-
Es habitual que un servo-drive de una marca se pueda conectar motores, encoders o resolvers de otras marcas, gracias a que se usan interfaces entandar para esas conexiones.
-
Normalmente se utilizan redes de comunicación y protocolos industriales para enviar los comandos de posicionamiento desde otros equipos al servo-drive
Question 5
Question
[Enero 2018] ¿Qué es OPC (OLE for Proccess Control)?
Answer
-
Se llama así a un PLC compacto sencillo que solo se puede programar en LD.
-
Es un tipo de controlador de motores de corriente continua que funciona en bucle abierto mediante estimación (Open Loop Estimator)
-
Es un estándar de protocolo de comunicación entre aplicaciones de software, que permite a una aplicación acceder a controladores para equipos de automatización de diferentes marcas.
-
Se trata de un sistema SCADA open-source para Linux Embeded.
Question 6
Question
[Julio 2018] Respecto al modo en que se leen las entradas y se actualizan las variables de entrada (%I) correspondientes durante la ejecución de un PLC, es cierto que:
Answer
-
El estado de una línea de entrada se copia en la variable de entrada correspondiente cada vez que en el programa se consulta dicha variable de entrada.
-
Aunque el PLC esté en modo STOP, y por ello el programa no se esté ejecutando, las variables de entrada se siguen actualizado con los estados de las líneas de entrada.
-
Cada vez que el estado de una línea de entrada cambia (su nivel de tensión cambia), se actualiza la variable de entrada correspondiente con el nuevo valor.
-
Las variables de entrada se actualizan con el valor real de las líneas de entrada solo en determinados instantes de muestreo, siendo el periodo de muestreo constante, aunque el programa no sea periódico y la duración de su ciclo aumente o disminuya
Question 7
Question
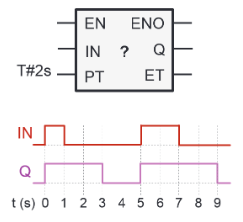
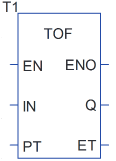
[Julio 2018] Un bloque de temporización causa una evolución temporal en su salida Q, respecto a la entrada IN, según se muestra en el diagrama de la derecha. ¿De qué bloque de temporización se trata?
Image:
2j2018 (binary/octet-stream)
{kind=link}
Answer
-
Es un bloque TON.
-
Es un bloque TOFF
-
Es un bloque TP.
-
Es un bloque TON con la entrada IN invertida.
Question 8
Question
[Julio 2018] ¿Para qué sirven la entrada EN y salida ENO de un bloque de función, como el bloque mostrado en la pregunta anterior?
Answer
-
Permiten usar bloques de funciones que no tienen entradas booleanas dentro de un programa en lenguaje LD (diagrama contactos), de forma que se ejecuten en el orden deseado.
-
Es imprescindible utilizar esas líneas para indicar el orden de ejecución de los bloques dentro de un programa en lenguaje FBD (diagrama de bloques funcionales)
-
Sirven para ejecutar el algoritmo que hay dentro del bloque paso a paso, y se utilizan solo para la depuración del programa
-
Al poner la entrada EN a “true” se interrumpe la ejecución del bloque, mientras que la salida ENO se pone automáticamente a “true” cuando ocurre un error dentro del bloque.
Question 9
Question
[Julio 2018] Para una articulación de un brazo robot industrial de gran tamaño se que requiere un control preciso de posición y velocidad, además de tener que generar grandes pares de fuerza y trabajar a velocidades altas. ¿Cuál de los siguientes tipos de motores eléctricos es más adecuado para esa aplicación?
Answer
-
Un motor DC
-
Un motor AC asíncrono trifásico
-
Un motor AC síncrono trifásico o brushless.
-
Un motor “paso a paso”.
Question 10
Question
[Julio 2018] ¿Qué es un SCADA?
Answer
-
Un servidor de base de datos específico para aplicaciones de automatización.
-
Una aplicación informática que hace de puente entre el nivel de control del proceso automatizado, y los niveles de producción y gestión de la empresa.
-
Una interfaz de usuario software, con gráficos generados por ordenador, que se ejecuta en una pantalla táctil en el nivel de control del proceso
-
Un estándar de comunicaciones industriales que facilita el intercambio de datos entre PLCs y sensores o accionamientos inteligentes.
Question 11
Question
[Enero 2019] Con respecto a la forma que un PLC gestiona y actualiza sus conexiones de salida a partir de las variables de salida (%Q), es cierto que:
Answer
-
El valor de una conexión de salida se actualiza cada vez que el programa cambia el valor de la variable de salida correspondiente
-
Aunque el programa escriba diferentes valores con múltiples operaciones en una misma variable de salida, solo la última operación de escritura de cada ciclo tendrá efecto en la conexión de salida correspondiente
-
El valor de una variable de salida solo admite escritura, esto es, el programa puede modificar el valor de una conexión de salida pero no puede leer su valor actual.
-
Aunque el PLC esté en modo STOP, y por ello el programa no se ejecute, las conexiones de salida se siguen actualizado con los valores de las variables correspondientes
Question 12
Question
[Enero 2019] En el programa de un PLC, se requiere que una variable booleana en memoria se ponga a 1 cuando una determinada entrada digital cambie a 1, que la variable en memoria siga siendo 1 mientras la entrada digital sea 1, y finalmente que, cuando la entrada digital cambie a 0, la variable en memoria tarde 5 segundos en cambiar a 0. ¿Cómo se puede resolver esta tarea más fácilmente?
Answer
-
Con un solo bloque TON.
-
Con un solo bloque TOFF
-
Con un solo bloque TP
-
Hace falta tres bloques: FE, TON y OR
Question 13
Question
[Enero 2019] En relación a las dos alternativas, PNP y NPN, que hay para configurar el cableado de las entradas y salidas digitales DC de un PLC, es cierto que
Answer
-
Con entradas en configuración PNP, la línea común o de referencia para todos los sensores se conecta a +24V
-
Con entradas en configuración NPN, cuando un sensor activa su salida o cierra su contacto, al PLC llega una tensión de +24V que se traduce en un 1 lógico.
-
Con salidas en configuración PNP, la línea común o de referencia para todos los preaccionamientos se conecta a 0V.
-
Con salidas en configuración NPN, al escribir un 1 lógico en una salida, la conexión de salida correspondiente se pone a +24V.
Question 14
Question
[Enero 2019] En un PLC M340 de Schneider se configura una entrada analógica para aceptar tensión en el rango de -10V a 10V, y para que, en el escalado del 0-100% de ese rango de tensiones a los valores de la variable de entrada, se aprovechen todo el rango de valores de la variable, que es de tipo INT (16 bits). ¿Qué valor tendrá la variable cuando la tensión de entrada es de 5V?
Answer
-
5
-
5000
-
16383
-
32767
Question 15
Question
[Enero 2019] ¿Cuál de las siguientes funciones NO es propia de una aplicación SCADA que gestiona un proceso?
Answer
-
Controlar la velocidad de un motor del proceso a bajo nivel, mediante un algoritmo de control en bucle cerrado como puede ser un PID
-
Comunicarse con distintos elementos de un proceso, como PLCs y controladores de motores, para recopilar información o enviar órdenes con nuevas consignas.
-
Almacenar los valores de las variables, o posibles eventos y alarmas, en una base de datos para mantener un histórico del proceso, y para poder hacer análisis posteriores.
-
Generar informes con resúmenes o estadísticas sobre determinadas variables del proceso gobernado, para ayudar a los operadores o directivos a tomar decisiones.
Question 16
Question
[Julio 2019] En la jerarquía CIM (Computer Integrated Manufacturing) que especifica los diferentes niveles de control de un sistema de automatización, es cierto que:
Answer
-
Los equipos inteligentes como PLCs o controladores de movimiento se encuentran en el “nivel de gestión” o ERP (Enterprise Resource Planning).
-
El “nivel de producción” o MES (Manufacturing Execution System) se incluyen todos los accionamientos y sensores
-
Un sistema SCADA actúa de puente entre el “nivel de campo” y el “nivel de proceso”
-
En el “nivel de campo” se pueden gestionar E/S distribuidas mediante un fieldbus.
Question 17
Question
[Julio 2019] En la programación de un PLC ¿Qué distingue a los bloques de función elementales (EFB) o derivados (DFB) de las funciones elementales (EF)?
Answer
-
Las EF tienen estado interno para resolver operaciones complejas en varios ciclos, mientras que los EFB y DFB no tienen estado y solo realizan operaciones aritméticas simples.
-
Al usar un tipo de EFB o DFB hay que crear una instancia del mismo en la tabla de variables, mientras que una EF se pueden usar las veces que se quiera sin crear instancias
-
Los EFB y DFB solo se pueden usar en el lenguaje de diagramas de bloques funcionales (FDB), y no en diagrama de contactos (LD) ni en texto estructurado (ST), mientras que las EF se pueden usar en todos los lenguajes
-
En LD solo se pueden usar las EF, en FBD solo se puede usar los EFB o DFB, y en ST se pueden usar los tres tipos de funciones.
Question 18
Question
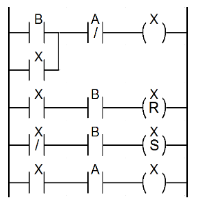
[Julio 2019] El programa en lenguaje de contactos o LD representado a la derecha no es recomendable porque actúa sobre la misma variable de salida “X” en varias redes. Pero, si se implementara este programa, ¿qué valor tendría la salida física del PLC asociada a “X” cuando “A=0” y “B=1”?
Image:
3j2019 (binary/octet-stream)
{kind=link}
Answer
-
La salida física siempre será 0.
-
La salida física siempre será 1
-
La salida física cambia entre 0 y 1 en cada ciclo
-
Indefinido: no se puede asegurar qué valor tiene la salida física.
Question 19
Question
[Julio 2019] Sobre un Variador de Frecuencia es cierto que:
Answer
-
Es un amplificador digital de puente H que se utiliza para gobernar motores DC de gran potencia mediante PWM (Pulse Width Modulation)
-
Es un amplificador para motores paso a paso que genera la secuencia de activación de las bobinas, y varía la velocidad del motor según la frecuencia de los pulsos de la secuencia
-
Se basa en un circuito inversor que genera las ondas de tensión necesarias para un motor AC trifásico, gobernando la velocidad del motor según la amplitud y frecuencia de las ondas.
-
Está diseñado para un control preciso de posición de un motor AC síncrono, y requiere siempre de una realimentación mediante un codificador o resolver acoplado al motor.
Question 20
Question
[Julio 2019] ¿Qué es OPC?
Answer
-
Una clase de amplificadores para motores que consiguen un control óptimo de la potencia.
-
Un estándar de comunicación entre aplicaciones de control de procesos industriales, que permite a diferentes aplicaciones y controladores software interactuar y compartir datos.
-
Object PLC Coding: un nuevo lenguaje visual y orientado a objetos que permite programar rápidamente aplicaciones para PLCs
-
Un SCADA para PCs (Personal Computers) que funciona sobre Linux y es Open-source.
Question 21
Question
[Enero 2020] Sobre las E/S (Entradas/Salidas) distribuidas para un PLC que hacen uso de un bus de campo ¿Qué característica de las siguientes es FALSA?
Answer
-
Las comunicaciones introducen retardos cuando el PLC accede a las señales de E/S
-
Existen diversos buses de campo usados por distintos fabricantes, con protocolos diferentes
-
Facilitan el cableado de sensores y accionamientos cuando estos se encuentran a gran distancia del PLC.
-
Aumenta el número de cables y hace que el cableado sea más caro cuando se dispone de muchos sensores y accionamientos, frente al cableado directo de E/S al PLC
Question 22
Question
[Enero 2020] Sobre una variable de tipo “%Q” del programa de un PLC, es FALSO que:
Answer
-
Su valor se traslada a una salida solo después de acabar la ejecución del programa.
-
Es una variable del sistema operativo del PLC que proporciona información de su estado
-
Es una variable cuyo valor se puede leer y modificar.
-
Es una variable booleana que requiere tener asociada una dirección de E/S.
Question 23
Question
[Enero 2020] ¿Qué ventaja tiene utilizar un conjunto de servodrive con su motor AC síncrono frente a usar un variador de frecuencia con un motor AC asíncrono?
Answer
-
La primera opción permite una mayor precisión en el control de velocidad y posición.
-
La primera opción es más económica, para motores de potencia similar.
-
Un servodrive trabaja con motores económicos de 50Hz, mientras que un variador genera ondas trifásicas de alta frecuencia (5KHz) para un motor especial de imán permanente.
-
El servodrive permite el frenado eléctrico del motor mientras que el variador de frecuencia no ofrece esta opción
Question 24
Question
[Enero 2020] ¿Qué afirmación es cierta sobre los cilindros neumáticos?
Answer
-
En general, un cilindro de simple efecto está diseñado para ejercer fuerza al extender o al recoger su vástago, pero no para ejercer fuerza ambos casos.
-
El vástago o pistón puede tener un recorrido mayor en un cilindro de simple efecto que en uno de doble efecto
-
Un cilindro de simple efecto requiere más conexiones aire y un sistema de válvulas de mando más complejo que un cilindro de doble efecto
-
Un cilindro de simple efecto utiliza un muelle para recoger su vástago, mientras que uno de doble efecto utiliza un muelle para extender su vástago
Question 25
Question
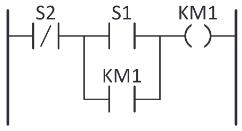
[Enero 2020] El programa LD (diagrama de contactos) mostrado a la derecha activa o desactiva la salida KM1 en función de dos entradas S1 y S2 conectadas a pulsadores, de forma que uno de los pulsadores activa
la salida (KM1=1) al ser pulsado, y el otro desactiva la salida (KM1=0) cuando se pulsa. ¿Qué configuración deben tener los contactos de los pulsadores?
{kind=link}
Answer
-
Los dos, S1 y S2, deben tener contactos normalmente abiertos (NO).
-
Los dos, S1 y S2, deben tener contactos normalmente cerrados (NC)
-
S1 debe tener contactos NO, y S2 debe tener contactos NC
-
S1 debe tener contactos NC, y S2 debe tener contactos NO.
Question 26
Question
[Ejemplo] Con respecto al funcionamiento de un PLC, en general es cierto que:
Answer
-
La tarea maestra o principal se ejecuta siempre de forma repetida y periódica, de modo que dura el mismo intervalo de tiempo (periodo) en cada ciclo de ejecución.
-
El valor de una conexión de salida se actualiza justo en el momento en que el programa cambia el valor de la variable de salida (%Q) correspondiente.
-
Cuando en el programa se accede a una variable de entrada (%I), su valor no tiene por qué ser el mismo que el que tiene la conexión de entrada correspondiente en ese instante
-
Para la detección de los flancos, o cambios del valor de una conexión de entrada digital, es imprescindible usar un evento o rutina de interrupción
Question 27
Question
[Ejemplo] Si hace falta añadir operaciones sobre valores numéricos, enteros o reales, dentro de un programa en lenguaje de contactos (LD), hay que tener en cuenta que:
Answer
-
No es posible incluir ese tipo de operaciones en LD, y hay que recurrir a otro lenguaje.
-
Se puede usar bloques de operaciones para valores numéricos en LD, conectándolos a las redes o circuitos lógicos con sus entradas EN y salidas ENO.
-
También se puede asignar variables numéricas a los contactos y bobinas de una red de LD, y no solo variables booleanas
-
Es necesario crear un nuevo bloque FBD que incluya las operaciones con números, y luego utilizar ese bloque dentro de LD
Question 28
Question
[Ejemplo] Se desea conectar un sensor de fotocélula de presencia, cuyas principales características se muestran a continuación, a un PLC. ¿Qué tipo de conexión de E/S entrada hace falta en el PLC?
Fotocélula Omron E3Z-D62.
Salida de colector abierto:
- 0V si detecta objeto en frente hasta una
distancia de 1m.
- Abierto si no se detecta objeto.
Image:
2 (binary/octet-stream)
{kind=link}
Answer
-
Entrada digital de DC y NPN.
-
Entrada digital de DC y PNP
-
Entrada analógica de 0 a 24V.
-
Salida digital DC y PNP
Question 29
Question
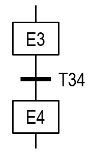
[Ejemplo] Dado el fragmento de un programa de GRAFCET o SFC indicado a la derecha, ¿Cuál es la forma más efectiva y recomendable de hacer que el paso de la etapa E3 a la E4 se produzca cuando la etapa E3 se ha ejecutado durante 1 segundo?
Image:
Aaaaa (binary/octet-stream)
{kind=link}
Answer
-
Definir en E3 una acción de tipo D (Delay) con duración de 1s, y poner como condición de la transición T34 el valor “1” o “true”.
-
Definir en E3 una acción que incluya un temporizador TON (por ejemplo “ton_1”), y condicionar T34 a la salida del temporizador (“t_on1.q”)
-
Definir un evento de temporizador que se habilita en una acción de E3, y en la sección del evento ejecutar “SETSTEP(grafcet, E4)”. La condición de T34 debe ser “0” o “false
-
Definir la transición T34 en función de la variable de tiempo de la etapa E3 con una condición como “E3.t T#1s”
Question 30
Question
[Ejemplo] ¿Cuál es la principal ventaja que tiene usar un motor AC síncrono con su servodrive frente a utilizar un motor AC tradicional con un variador de frecuencia?
Answer
-
En general, para igual potencia, la primera opción es más económico que la segunda
-
La primera opción permite un control de posición mucho más preciso que la segunda.
-
Con la primera opción suele ser posible combinar motores y servodrives de diferentes marcas, mientras que con la segunda el motor y el variador deben ser de la misma marca.
-
Con la primera opción no hace falta un sensor de posición del eje del motor, mientras que con la segunda es imprescindible.
Question 31
Question
[Julio 2021] Cuando un PLC está en modo ejecución, en cada ciclo de la ejecución del programa se llevan a cabo las siguientes operaciones, según el orden indicado:
Answer
-
Primero se ejecutan las tareas del sistema, después se leen los valores de las entradas, luego se ejecuta un ciclo del programa, y finalmente se asignan los valores a las de salidas
-
Primero se ejecutan las tareas del sistema, y después se ejecuta un ciclo del programa, durante el cual se van leyendo las entradas a medida que se usan las variables de entrada y también se van actualizando las salidas a medida que se calculan las variables de salida.
-
Primero se leen los valores de las entradas, después se ejecuta un ciclo del programa durante el cual se van actualizando las salidas a medida que se calculan las variables de salida, y finalmente se ejecutan las tareas del sistema
-
Primero se ejecuta un ciclo del programa, durante el cual se van leyendo las entradas a medida que se usan las variables de entrada, después se asignan los valores a las salidas, y finalmente se ejecutan las tareas del sistema
Question 32
Question
[Julio 2021] ¿Qué significa que un PLC tiene entradas y salidas distribuidas (o descentralizadas)?
Answer
-
El programa del PLC está organizado en diferentes secciones de código, entre las que hay sección dedicada a leer las variables de entrada, y otra sección destinada a escribir los resultados en las variables de salida
-
El PLC está montado en un mismo bastidor como un grupo de módulos de entradas y salidas, además de los módulos de la CPU y la fuente de alimentación.
-
El PLC se comunica, mediante un bus de campo, con módulos remotos que tienen entradas y salidas que pueden ser usadas en el programa.
-
Cada módulo de entradas o salidas del bastidor del PLC tiene sus propias conexiones de alimentación, y requiere de su propia fuente de alimentación.
Question 33
Question
[Julio 2021] ¿Qué tipo de amplificador o preaccionamiento se requiere para gobernar un motor paso a paso de dos bobinas (bipolar)?
Answer
-
Un variador de frecuencia.
-
Un amplificador de puente H doble.
-
Un contactor de categoría AC1.
-
Un servodrive.
Question 34
Question
[Julio 2021] Una máquina utiliza los estados de GEMMA mostrados en la imagen. A partir de estos estados, se puede afirmar que el funcionamiento de la máquina incluye:
{kind=link}
Answer
-
Una gestión de parada de emergencia.
-
Un modo de funcionamiento manual completo
-
Un modo de funcionamiento manual restringido, o de ejecución paso a paso.
-
La opción de continuar la producción después de una parada a mitad de ciclo.
Question 35
Question
[Julio 2021] ¿Qué es una unidad de mantenimiento de una instalación neumática y para qué sirve?
Answer
-
Un accesorio que instala en un cilindro neumático para facilitar su desmontaje y limpieza.
-
Un conjunto de elemento que incluye unos filtros que limpian y lubricas el aire que se envía a las válvulas y cilindros, así como un mando de ajuste de la presión.
-
El conjunto formado por el compresor, tanque de almacenamiento, y manómetro y se encarga de generar y almacenar el aire comprimido
-
El subsistema que comprende el PLC y los circuitos eléctricos que controlan las electroválvulas.
Question 36
Question
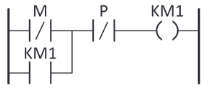
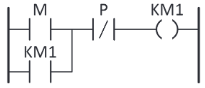
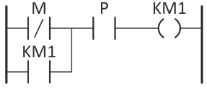
[Enero 2022] Se quiere implementar un funcionamiento de marcha-paro para un relé KM1 usando el lenguaje LD, de modo que, al actuar un instante sobre un pulsador M se active el relé (KM1=true), y al actuar un instante sobre un pulsador P se desactive el relé (KM1=false). Tanto M como P normalmente cerrados. ¿Qué solución es válida?
Answer
-
A.Image:Opc A (binary/octet-stream)
-
B.Image:Opc B (binary/octet-stream)
-
C.Image:Opc C (binary/octet-stream)
-
D.Image:Opc D (binary/octet-stream)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Question 37
Question
[Enero 2022] ¿En qué caso el código de una sección del programa de un PLC puede asignar un nuevo valor a una variable asociada a una dirección de entrada física (%I)?
Answer
-
Nunca
-
Cuando la entrada es booleana (%IX), mediante la opción de forzado de las entradas
-
Cuando la entrada es analógica (%IW) y el código está en texto estructurado
-
Cuando el PLC está en modo STOP
Question 38
Question
[Enero 2022] ¿Qué ventaja aporta un cilindro neumático de doble efecto frente a un músculo neumático, considerando que ambos desarrollan fuerzas grandes y similares?
Answer
-
El cilindro de doble efecto es más ligero que el músculo.
-
El cilindro de doble efecto ofrece una relación lineal entre la presión del aire y la fuerza de tracción, mientras que con el músculo la relación no es lineal
-
El cilindro de doble efecto tiene solo una toma de aire mientras que el músculo tiene dos.
-
El cilindro de doble efecto es robusto y soporta ambientes duros, y el músculo no.
Question 39
Question
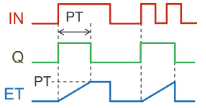
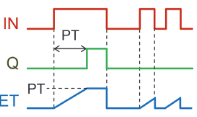
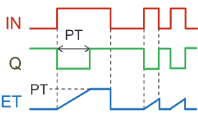
[Enero 2022] ¿Qué cronograma de los siguientes describe correctamente el funcionamiento de un bloque de temporización TOF según el estándar IEC 61131?
Image:
Ton (binary/octet-stream)
{kind=link}
Answer
-
AImage:Ton A (binary/octet-stream)
-
BImage:Ton B (binary/octet-stream)
-
CImage:Ton C (binary/octet-stream)
-
DImage:Ton D (binary/octet-stream)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Question 40
Question
[Enero 2022] Respecto a los bloques predefinidos que se pueden utilizar en los lenguajes de programación de un PLC, ¿Qué diferencia hay entre una Función Elemental (EF) como por ejemplo operaciones lógicas o matemáticas (AND, OR, ADD, MUL, etc.), y un Bloque de Función Elemental (EFB) como por ejemplo detecciones de flancos, biestables o temporizadores (F_TRIG, RS, TON, etc.)?
Answer
-
Al emplear un EFB es necesario conectar su entrada EN y su salida ENO a otros bloques para fijar un orden de ejecución, mientras que un EF no tiene las conexiones EN y ENO.
-
Un EFB es un tipo de datos y se requiere crear una variable (o instancia) de ese tipo para utilizarla en un programa, mientras que un EF se usa directamente sin instancias.
-
Los EF solo se pueden utilizar en el lenguaje de contactos (LD), mientras que los EFB solo se pueden usar en los lenguajes de bloques (FBD) y texto estructurado (ST)
-
Las EF son operaciones no bloqueantes (devuelven el control al programa rápidamente), mientras que los EFB pueden bloquear la evolución del programa durante muchos ciclos
Question 41
Question
[Junio 2022] Para la sección de programa en lenguaje LD que se muestra en el diagrama de abajo ¿Cuál es la función lógica equivalente en lenguaje ST?
{kind=link}
Answer
-
s := (NOT a) AND (s OR b)
-
s := b OR (s AND (NOT a));
-
s := (b AND (NOT a)) OR s;
-
s := (NOT a) AND b
Question 42
Question
[Junio 2022] Con respecto al funcionamiento de un PLC, en general es cierto que:
Answer
-
La tarea maestra o principal se ejecuta siempre de forma repetida y periódica, de modo que dura el mismo intervalo de tiempo (periodo) en cada ciclo de ejecución
-
Cada vez que el estado de una línea de entrada cambia (su nivel de tensión cambia), se actualiza la variable de entrada correspondiente (%I) con el nuevo valor.
-
Cuando en el programa se accede a una variable de entrada (%I), su valor no tiene por qué ser el mismo que el que tiene la conexión de entrada correspondiente en ese instante
-
El valor de una conexión de salida se actualiza justo cada vez que el programa cambia el valor de la variable de salida (%Q) correspondiente
Question 43
Question
[Junio 2022] Se requieren unos motores para mover las cintas transportadora de una tolva, lo cuales deben ser económicos, robustos, y de gran potencia para mover cargas grandes. Estos motores girarán solo en un sentido en la aplicación, pero deben permitir que un PLC controle su activación y regule su velocidad en un rango, aunque sin necesidad de una buena precisión. ¿Qué opción es la más adecuada para los motores?
Answer
-
Motor AC monofásico gobernado mediante un contactor.
-
Motor AC trifásico estándar gobernado mediante tres contactores.
-
Motor AC trifásico estándar gobernado mediante un variador de frecuencia
-
Motor AC trifásico síncrono con su correspondiente servodriver y codificador de posición
Question 44
Question
[Junio 2022] En una instalación de neumática, ¿Qué elemento se suele utilizar para amortiguar el movimiento del émbolo de un cilindro al acabar de extenderse o recogerse?
Answer
-
Válvula de estrangulación unidireccional.
-
Válvula anti-retorno.
-
Detector magnético o de efecto Hall
-
Músculo neumático
Question 45
Question
[Junio 2022] Cada etapa de un programa SFC tiene asociada una variable con un nombre como “etapa.x”. ¿Qué significado tiene esta variable?
Answer
-
Es un indicador booleano que es cierto si la etapa está activa
-
Es el tiempo que ha estado ejecutándose la etapa desde su activación.
-
En un indicador booleano que se pone a cierto si la etapa dura más de lo establecido en sus propiedades.
-
Es una variable booleana que permite activar o desactivar la etapa según se escriba en ella un valor de cierto o false respectivamente
Want to create your own Quizzes for free with GoConqr? Learn more.